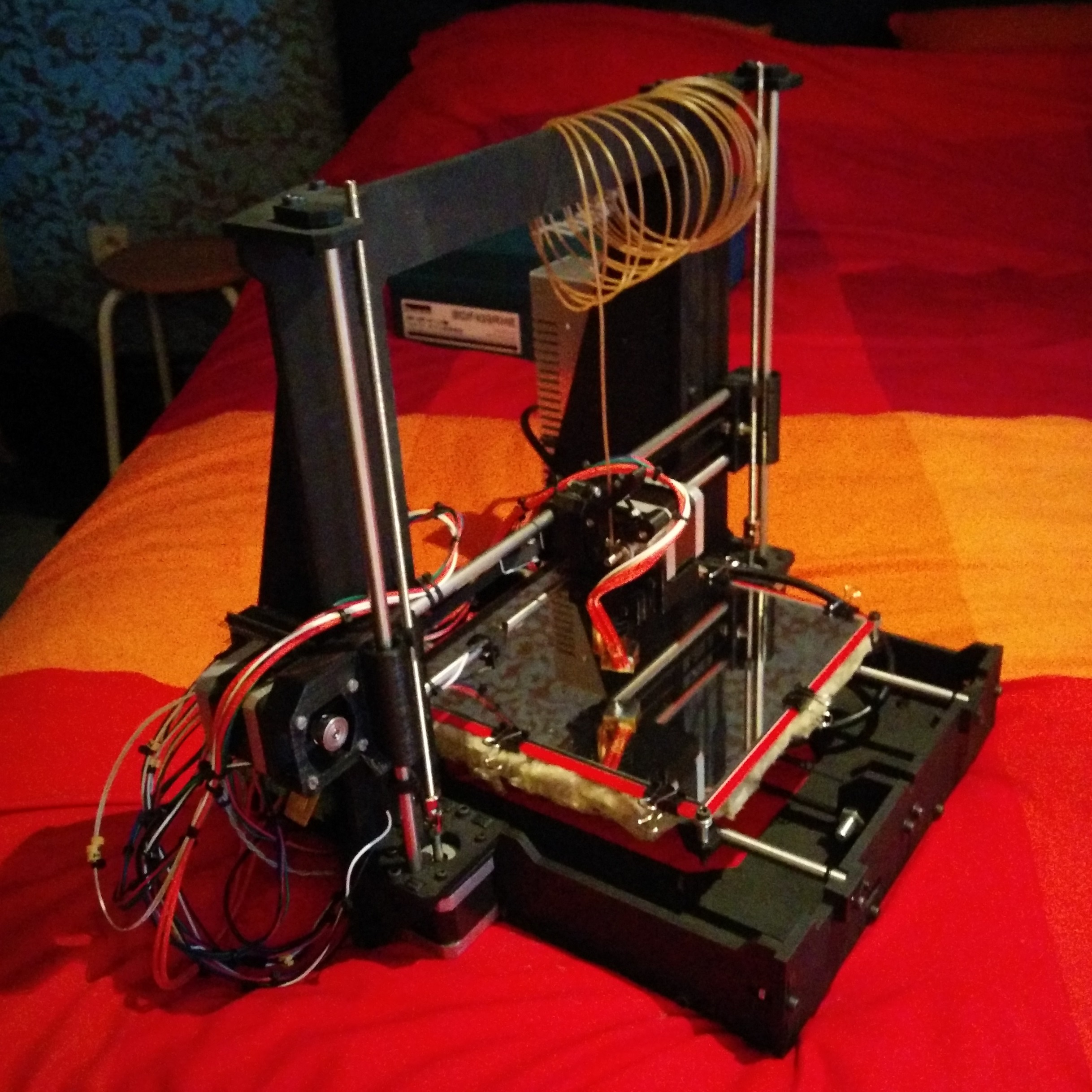
3D Printing
During the rise of DIY 3D printing in the maker community, designed and assembled a Graber i3-based 3D printer from scratch, including a custom laser-cut frame and firmware configuration, tackling challenges in mechanical and electrical systems design.

Mealworms
Designed controlled breeding experiments to evaluate the feasibility of mealworm cultivation as a sustainable food source, following European regulatory approval for insect consumption. Performed an empirical study to compare setups and assess yield and labor costs.
Web Development
Built and maintain this website using static generation with a responsive Bootstrap frontend, deployed on a self-managed, datacenter-hosted, Linux environment, giving me control over the full stack from markup to infrastructure.
Antenna Design
Designed and characterized antennas across a wide frequency range (HF through mmWave), for research applications including wireless sensing, low-power communication, and over-the-horizon communication.
Crowd Counting
Conducted a methodical comparative study of manual and technological crowd counting methods across multiple large-scale events, in collaboration with the University of Antwerp and KDG University College. Results informed Telwijzer, a decision-support tool recommending counting strategies to event organizers based on accuracy, cost, and event parameters.
Project InformationAutonomous Navigation on Inland Waterways
Developed perception and navigation algorithms for autonomous barges in urban waterways, in collaboration with imec and industrial partners, contributing to a broader initiative to shift last-mile logistics from road to water.
Project Information